

Kinematics#
The kinematics of the hexapod are explained here based on the hexapod_kin_calc.slx in ts_mt_hexRot_simulink. The inverse kinematics is used to transform the hexapod positions \((x, y, z, r_{x}, r_{y}, r_{z})\) to 6 delta strut lengths from the origin. The forward kinematics is to transform the 6 delta strut lengths to the hexapod positions.
Inverse Kinematics#
As a typical hexapod with 6 struts, define their positions on the base are:
, where \(\vec{p}_{\text{base, n}} = (x_{n}, y_{n}, z_{n})\) is the position of each strut \(n\). Define their positions on the mirror to be:
Since the hexapod can do the translation \((x, y, z)\) and rotation \((r_{x}, r_{y}, r_{z})\), the related rotation center is defined to be the pivot, \(\vec{p}_{\text{v}} = (p_{\text{x}}, p_{\text{y}}, p_{\text{z}})\).
If the hexapod moves the position \((x, y, z)\) from the origin, the related strut change from the pivot is:
For the rotation \((r_{x}, r_{y}, r_{z})\), define the rotationr matrix to be: \(R_{xyz} = R_{x}(r_{x})R_{y}(r_{y})R_{z}(r_{z})\). The related strut change is:
The strut change in the translation and rotation directions from the mirror is:
Consider the strut change for each x, y, and z component, the total strut change is: \(\vec{s}=(s_{1}, s_{2}, \cdots, s_{6})\), where each component \(n\) is:
The norminal stuct change between the base and mirror is:
Finally, the delta strut change is:
See the full calculation in SimpleHexapod.inverse_kinematics() of simple_hexapod.py.
Forward Kinematics#
To calculate the hexapod positions, the Nelder-Mead method is used to minimize the difference between the estimated and current delta strut lengths with the initial guess of current hexapod positions.
See the full calculation in SimpleHexapod.forward_kinematics() of simple_hexapod.py.
Hexapod Types#
There are two hexapods on the main telescope: camera hexapod and M2 hexapod. See the following figures for these two hexapods:
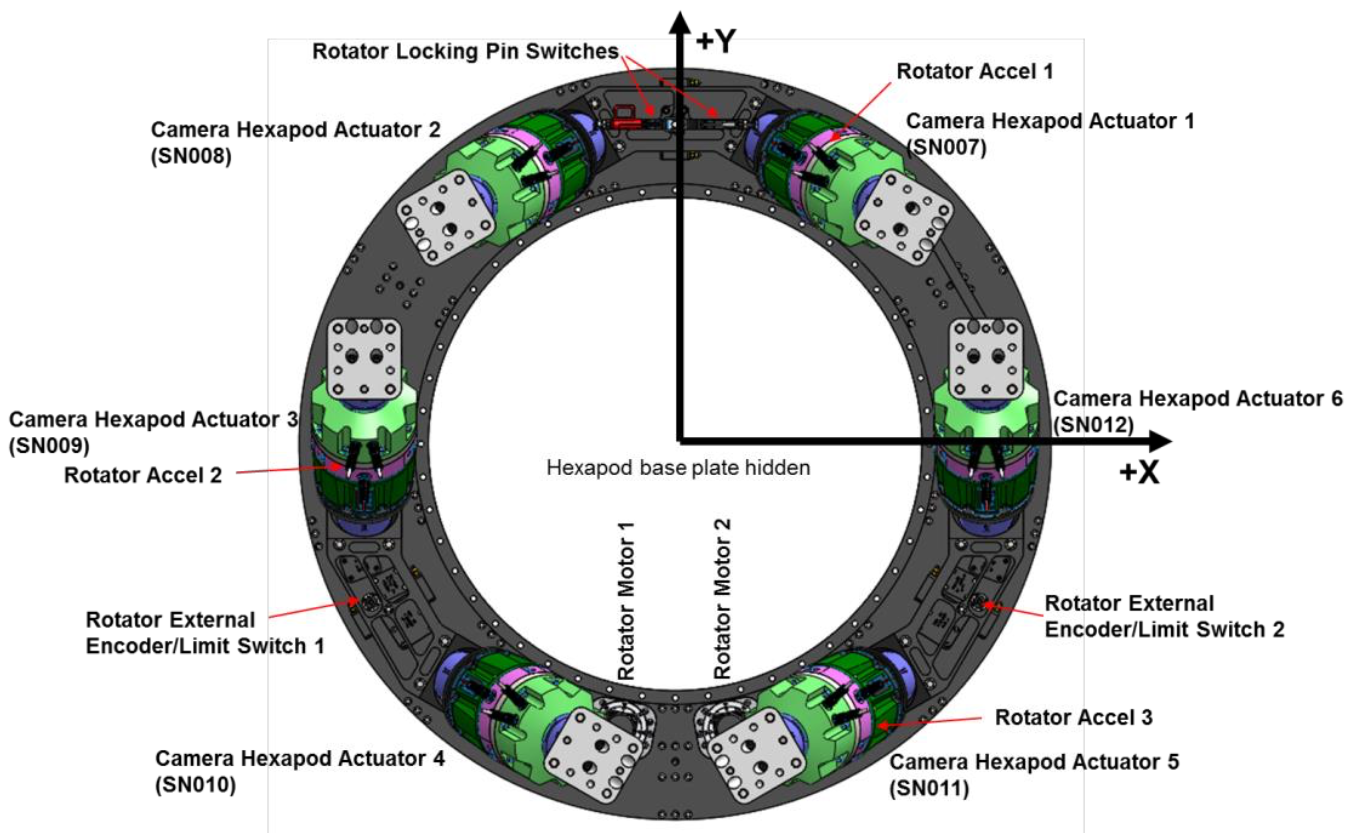
Coordinate system and actuator locations/numbering for camera hexapod.#
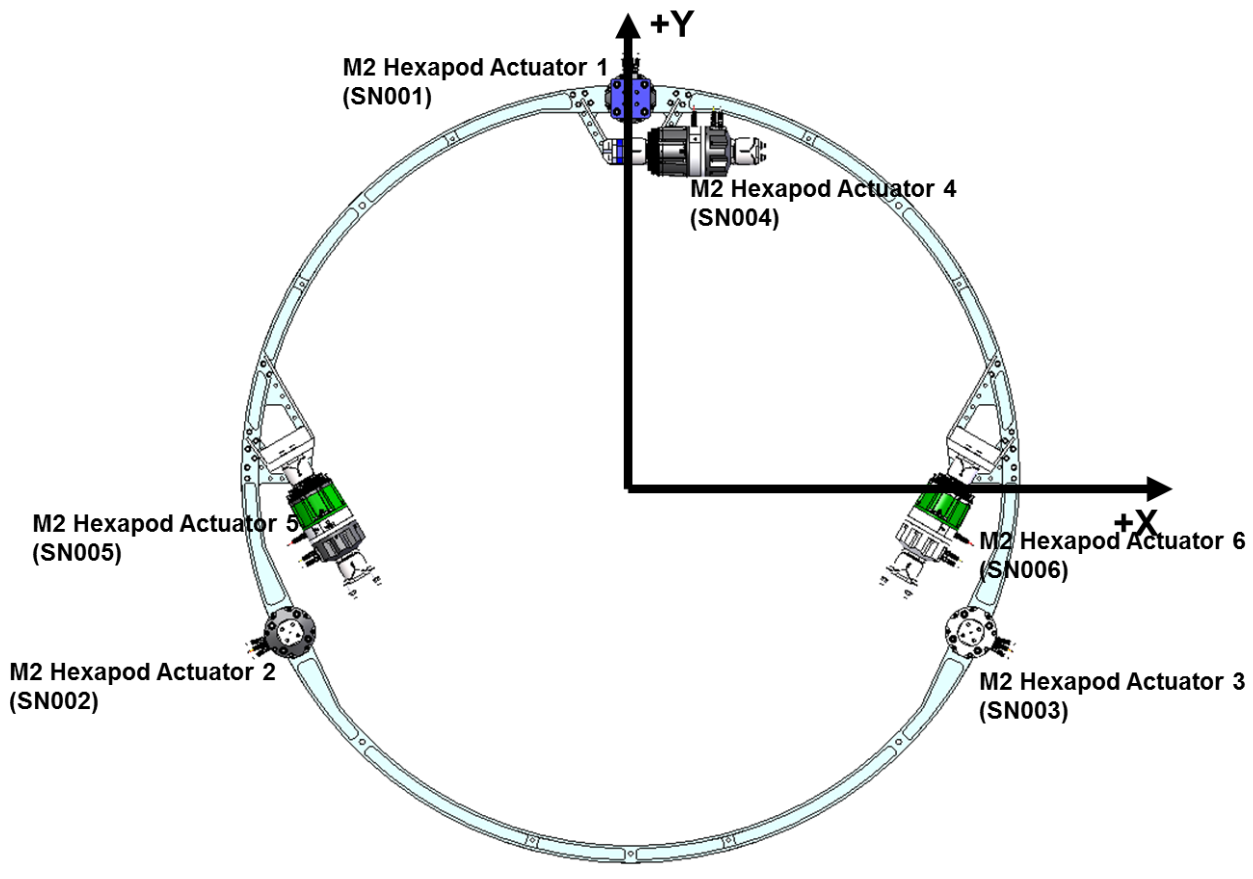
M2 hexapod coordinate system and actuator locations/numbering for the M2 hexapod.#
The related base and mirror positions are recorded in the constants.py as a reference.
You can see their mechanical structures are different. For the camera hexapod, 6 struts move together to do the z-axis movement. However, for the same movement, the M2 hexapod only uses the struts 1-3. In addition, for the x-axis movement, the M2 hexapod uses the struts 4-6. The strut 4 contributes most of this moving. For the y-axis movement, the M2 hexapod uses the struts 5 and 6 only, and the strut 4 is not used.