

Developer Guide#
The MTHexapod CSC is implemented using ts_salobj and ts_hexrotcom.
API#
The primary class is:
HexapodCsc: the CSC.
lsst.ts.mthexapod Package#
Functions#
|
Check that a numeric value is in range min_value <= value < 0. |
|
Raise ExceptionClass if proposed new position limits are not with range of the maximum allowed position limits. |
|
Raise ExceptionClass if a position is not within limits. |
|
Check that a numeric value is in range 0 < value <= max_value. |
|
Check that a numeric value is range min_value <= value <= max_value. |
|
Check that a numeric value is in range -max_value <= value <= max_value. |
Run the hexapod commander. |
|
|
Get the next position. |
|
Rotate a 2-d position by the specified angle. |
|
Rotate a 3-d position about the x axis. |
|
Rotate a 3-d position about the y axis. |
|
Rotate a 3-d position about the z axis. |
Run the MTHexapod CSC. |
Classes#
|
Values for the |
|
Compute hexapod compensation for elevation, azimuth, camera rotation, and temperature. |
|
Input values for the compensation model. |
MTHexapod configuration. |
|
|
A real-valued Fourier series. |
|
Command the MTHexapod CSC from the command line. |
|
MTHexapod CSC. |
|
Mock MTHexapod controller that talks over TCP/IP. |
Handle annoying order of strut_measured_posfiltvel telemetry fields. |
|
|
The position and orientation of the hexapod pivot point. |
|
Position limits. |
|
A polynomial that is linear outside a specified range. |
|
|
|
Substates for the ENABLED state. |
|
Substates for the camer shutter. |
|
Simple model of a hexapod: 6 linear actuators in an arbitrary arrangement. |
MTHexapod telemetry. |
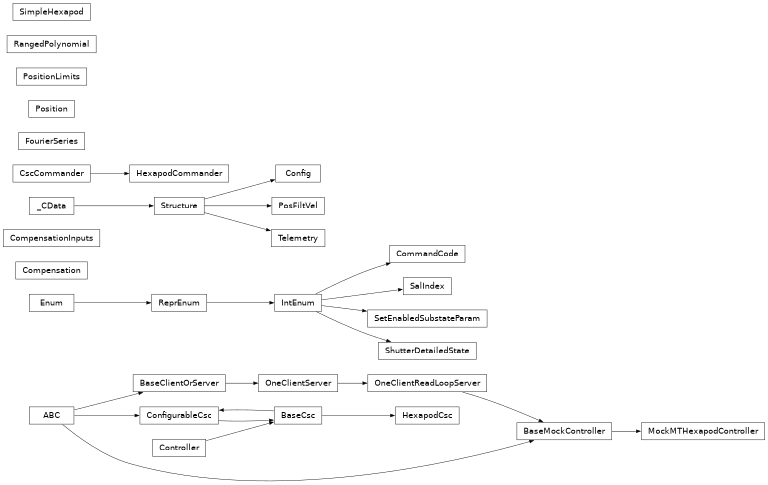
Class Inheritance Diagram#
Build and Test#
This is a pure python package. There is nothing to build except the documentation.
setup -r .
pytest -v # to run tests
package-docs clean; package-docs build # to build the documentation
Contributing#
ts_mthexapod is developed at lsst-ts/ts_mthexapod.
You can find Jira issues for this package using labels=ts_mthexapod..